EPFLの研究チームが、ソフト歪みセンサーを備えた空気圧アクチュエータを試作し、触覚フィードバックに対する閉ループ制御を実現したと報告し、その研究成果をSoft Roboticsに寄稿しました。
最新のウェアラブル技術では、身体により近いコミュニケーション、センシング、フィードバックのための、より直感的で洗練されたインターフェースが必要です。
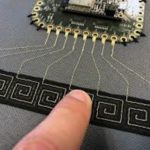
EPFLの研究チームは、双方向の触覚情報転送を可能にして、よりシンプルで応答性の高いウェアラブルインターフェイスを実現する、新しいソフト空気圧アクチュエータ(SPA)ベースのセンサー統合インターフェイス、SPAスキンを試作しています。
このSPAスキンは、大きな多軸ひずみに耐え、高周波検知と動作が可能だそうです。構造は論文中に記載がありますが、柔らかいシリコーンエラストマーと金属の膜を使用しているとのことです。
触覚フィードバックを閉ループ制御するには、プラットフォームに凝集した統合システムが必要になり、EPFLのシステムは、伸縮性のある低プロファイル(<500 lm)SPAと超準拠の金属薄膜ひずみセンサーで構成されており、力で調整可能な振動フィードバックを介した触覚センシング用の新しい双方向プラットフォームを作成したとしています。
このプロトタイプを使用して、可変負荷の下で維持される最大1Nの出力で、最大100Hzのリアルタイムでアクチュエータ形状の制御を実証しました。さらに、さまざまな作動振幅と周波数での静的および動的な挙動についてSPAスキンプラットフォームを特徴付け、このシステムの分析モデルを開発して、埋め込みセンサーの抵抗のみを使用してアクチュエーターの膨張状態を予測したと主張しています。
SPAスキンは、接触センシングと振動触覚フィードバック用の高速ウェアラブル双方向インターフェースとして容易に実装できる多機能多層システムであり、センシングとアクチュエータの閉ループ制御に裏打ちされた高忠実度の触覚フィードバックのための理想的な「ハードウェア」インターフェイスを提供すると主張しています。
Follow @aurordesign [1] : https://www.epfl.ch/labs/rrl/research-2/research-soft/page-148990-en-html/ [2] : Sonar, H. A., Gerratt, A. P., Lacour, S. P., & Paik, J. (2019). Closed-Loop Haptic Feedback Control Using a Self-Sensing Soft Pneumatic Actuator Skin. Soft robotics.