ソフトウェアラブルロボットは、下肢と上肢をサポートし、重量物を持ち上げる能力を高め、歩行と走行に必要なエネルギーを減らし、触覚フィードバックも提供できます。ただし、これまでのウェアラブルロボットのほとんどは、電磁モーターまたは流体アクチュエータに基づいており、前者は剛性でかさばり、後者は外部ポンプまたはコンプレッサーを必要とするため、統合と携帯性が大幅に制限されていました。
EPFLと東工大の研究チームが、細くて繊維のようなMcKibben型アクチュエータと完全に伸縮可能なポンプを組み合わせた、新しい電気駆動の柔らかい流体筋肉について発表しています。
これらのポンプは、電界によって液体分子を直接加速する固体ポンプ機構であるEHD(ElectroHydroDynamics)に依存しています。
可動部品を必要としないため、ポンプの動作音は静かであり、動作中に曲げたり伸ばしたりすることができます。
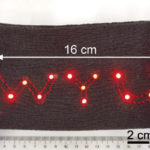
各電動流体筋肉は、伸縮性ポンプ1台と薄いMcKibbenアクチュエータ1台で構成され、重量が2 gの細長いソフトデバイスになるそうです。
今後、応答時間の短縮とエネルギー効率の向上に焦点を当てると報告しており、繊維に統合するためのモジュール式で簡単なこれらの電気駆動による人工筋肉の制作は、人間の支援と能力拡張、増強のための多機能機能を備えた柔らかくスマートな衣服を可能にする、と締めくくっています。
Follow @aurordesign [1] : Cacucciolo, V., Nabae, H., Suzumori, K., & Shea, H. (2019). Electrically-driven soft fluidic actuators combining Stretchable Pumps with Thin McKibben Muscles. Frontiers in Robotics and AI, 6, 146.URL : https://www.frontiersin.org/articles/10.3389/frobt.2019.00146/full