バッテリーレスでIDを識別するRFIDタグに関する技術
本論文はHCIの国際会議であるACM Symposium on User Interface Software and Technology(通称:UIST)の2018年度に報告された内容です。
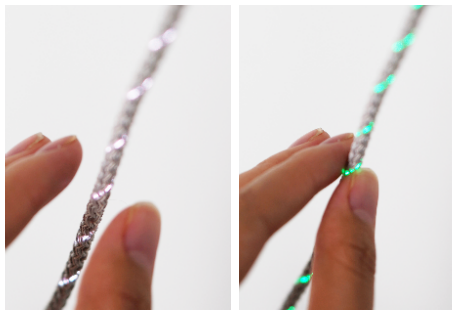
論文で紹介されているのは、2つのRFID(ID情報を埋め込んだタグから、電磁界や電波などを用いた近距離の無線通信によって情報をやりとりするもの)タグ間で、尚且つバッテリーなしで分散型の近接ID識別を有効にする手法です。このモジュールは、IDの識別だけでなく、磁気反発力による触覚フィードバックも提供するため、ユーザーは物理的な制約を受けることなく、システムの状態を知覚できる、と著者らは主張しています。
バッテリーレスの環境発電モジュールと発光ダイオードを介して、視覚的なフィードバックを追加できるという新しいこのモジュールは、現在言われているようなIoTの世界観を加速させる技術になるかもしれません。今後、持ち運び可能にするために十分にハードウェアを小さくするなど、さらなる改善を行うことで消費者に浸透するかもしれません。
[1] : Liang, R. H., Hsieh, M. J., Ke, J. Y., Guo, J. L., & Chen, B. Y. (2018, October). RFIMatch: Distributed Batteryless Near-Field Identification Using RFID-Tagged Magnet-Biased Reed Switches. In The 31st Annual ACM Symposium on User Interface Software and Technology (pp. 473-483). ACM.