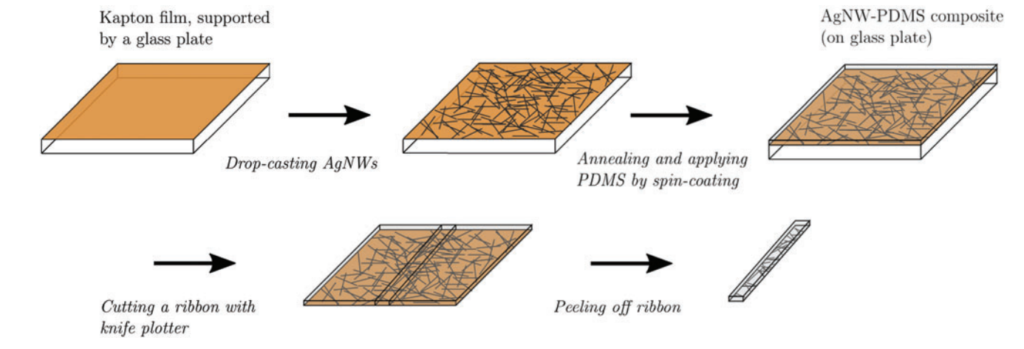
(論文[1]のFigure 2より引用)
マイクロエアビークル(MAV)を効率的に制御およびナビゲートするには、小型、軽量、耐久性、高感度、高速、低電力の対気速度センサーが必要です。これらの要件を満たすようにセンサーを設計する場合、柔軟な材料は、それらが耐えることができる大きな変形のために、より伝統的な材料の代替品として有望です。
ストックホルム大学らの研究チームが、小型無人飛行機(MAV)を効率的に制御およびナビゲートするための必要なすべての基準を満たす弾性フィラメント速度測定に基づいた、柔らかいマテリアルフローセンサーの新しいコンセプトを開発し、その成果を2020年度のSoft Roboticsに寄稿しています。
この手法は、2つの支持体の間に吊り下げられ、対象の流れにさらされている柔らかいリボンのひずみに関連付けることによって、流速を測定しています。
リボンはポリジメチルシロキサンから製造されており、銀ナノワイヤーを追加することでピエゾ抵抗性にすることができ、この製造方法であれば、センサーはクリーンルームの外で一般的なラボツールを使用して作成できるため、大幅にシンプルにできるとしています。
さらに、シンプルな回路を使用して操作でき、ピエゾ抵抗材料を使用すると、歪んだリボンの抵抗変化に合わせて流速を調整できるとしています。
ポリマークリープなどの特定の課題は未解決のままですが、センサーは、実験を通じて空気中で最低4 m / sまでの流速を測定する能力を実証したとしています。時間依存の分析モデルでは、現在のセンサーの帯域幅が480 Hzであることを示していおり、センサーの感度と帯域幅は、リボンの形状と材料特性を変更することで変えることができるとしています。