ソフトロボットデバイスの3次元(3D)およびいわゆる4次元印刷を含む現在の積層造形は、ミリメートルサイズに制限されています。
スウェーデンのリンショーピング大学の研究チームが、マイクロメートルスケールでさらに小さな構造を製造するために、ソフトマイクロアクチュエータとマイクロロボットの積層造形を実施、その成果を2020年度のSoft Roboticsに寄稿しています。
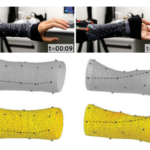
特注の押し出し3Dプリンターを使用して、マイクロアクチュエーターは300・1000μm2のサイズに縮小され、最小厚さは20μmを達成しており、マイクロスケールのアクチュエータを製造しています。
アクチュエータを駆動するために印刷された本体と電気活性ポリマーを組み合わせたマイクロアクチュエータは、デバイス構造のコンピュータ支援設計モデルから製造したそうです。
3D印刷プロセスの使いやすさと多様性を実証するために、1000から5000μmの範囲の長さのさまざまな長さのマイクロアクチュエータを製造、評価しています。同様に、リジッドボディと個別に制御される自由に動く腕または脚で構成されるマイクロロボットデバイスを3Dプリントし、簡単な積層造形技術によって、ソフトグリッパー、マニピュレーター、またはマイクロロボットの微細加工を探索した結果を紹介しています。
本論文以外にも記事もありますので、末尾に紹介しておきます。
Follow @aurordesign [1] : Tyagi, M., Spinks, G. M., & Jager, E. W. (2020). 3D Printing Microactuators for Soft Microrobots. Soft Robotics.URL : https://www.liebertpub.com/doi/10.1089/soro.2019.0129
[2] : https://liu.se/en/news-item/soft-robots-3d-printed-in-sub-millimeter-sizes