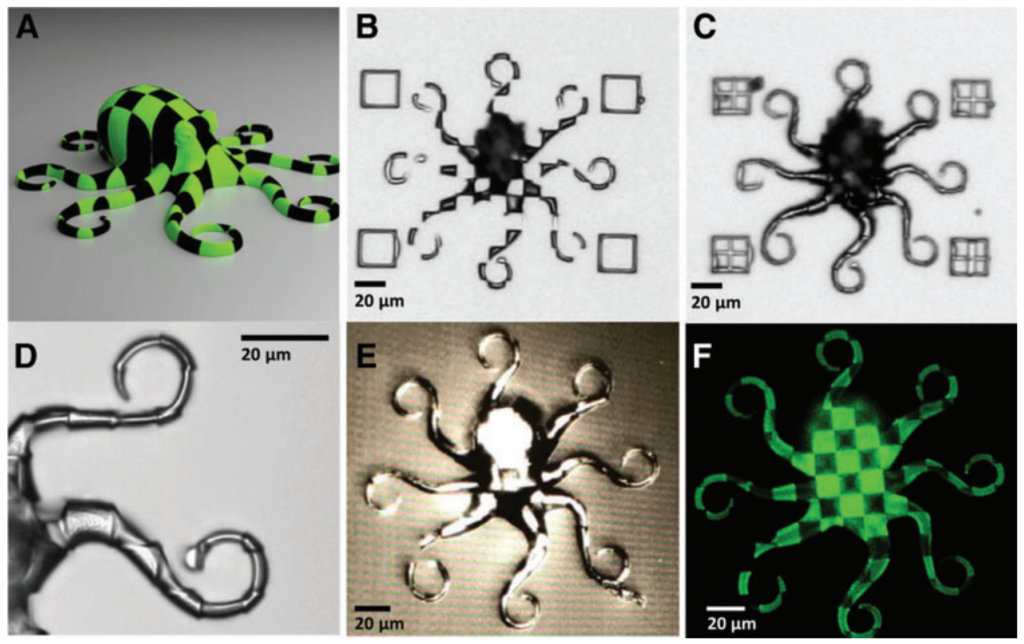
(論文[1]のFigure 2より引用)
マルチマテリアルのメカニズムは、すべての長さスケールの自然な生物全体に見られます。剛体の構造材料から柔らかく弾性のある材料まで、体内のさまざまな材料が、複雑な環境での移動を可能にします。最小のロボットの場合、柔らかな素材と硬い素材を組み合わせると、コンプライアンスが向上するため、コンパクトなスペースで大きな動きを促進できます。ただし、さまざまな材料コンポーネントを3Dでマイクロスケールで統合することは困難です。
メリーランド大学らの研究チームが、2光子重合を使用した3Dマイクロスケールマルチマテリアル製造のアプローチを提案し、その研究成果をSoft Roboticsに寄稿しています。
ヤング率が3桁異なる2つの材料が連続したサイクルで印刷され、200%を超えるひずみが可能な柔らかい弾性材料と剛性材料を統合することで、3 lm解像度未満の層精度で、強固に接着されたハイブリッド要素の形成が可能になったと報告しています。
論文中では大きな変形を示すマルチリンクマルチマテリアルメカニズムと、複雑な設計のラピッドプロトタイピングを示す3Dプリントされた2mm翼幅羽ばたき翼メカニズムを示しています。また、この手法は他の材料にも拡張できるため、小規模ロボットの機能と複雑さを向上させることができると主張しています。
Follow @aurordesign [1] : Soreni-Harari, M., St. Pierre, R., McCue, C., Moreno, K., & Bergbreiter, S. (2019). Multimaterial 3D Printing for Microrobotic Mechanisms. Soft robotics.