銀ナノワイヤーを用いたテキスタイルベースの歪みセンサの開発
(論文[1]のFigure1より引用)
ウェアラブルひずみセンサーは、人間の動きの検出、電子皮膚、人間とコンピューターの相互作用などのアプリケーションでの無限の見通しのため、多くの関心を集めています。
ただし、一般に複雑な製造方法は、広い検出範囲と高感度を備えたひずみセンサーの製造に使用されます。
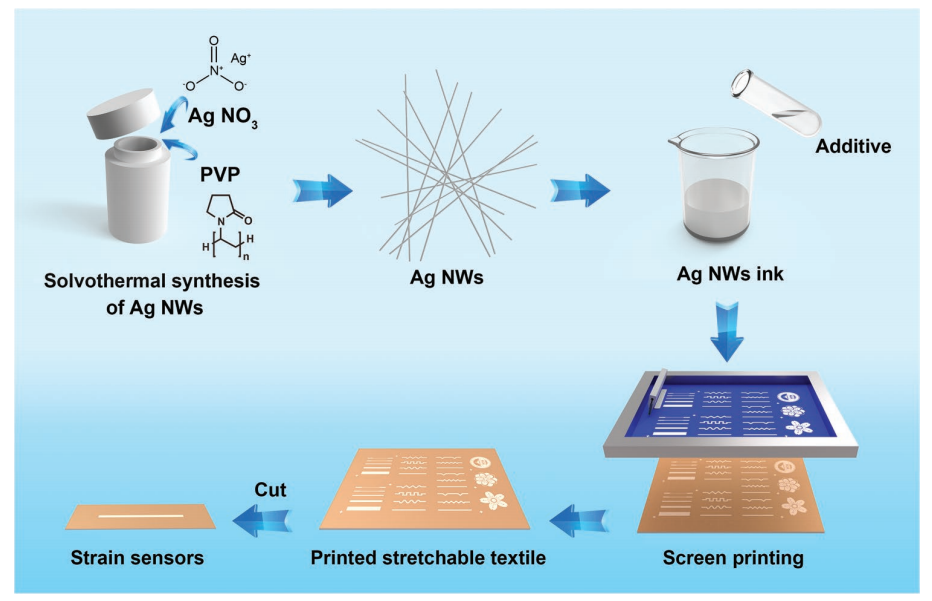
武漢大学の研究チームが、高性能テキスタイルベースのひずみセンサー(TSS)を、銀ナノワイヤインクを伸縮性のあるテキスタイルに転写することにより、ワンステップスクリーン印刷法によって製造できる方法を開発し、その研究成果をAdvanced Materials Technologiesに寄稿しました。
さまざまなパターンのスクリーンプレートを設計することで、異なる検出範囲と感度を備えた最適化されたTSSを同時に実現できるそうで、中でも、直線構造のTSS(幅2mm)は、120%の広い実行可能な歪み範囲、216の高いゲージ率、および優れた耐久性(2000以上の伸縮サイクル)を示し多そうですます。
柔軟なウェアラブルデバイスとして、これらのTSSは人間の関節の動きを監視するために使用され、人間の健康検出、ソフトロボット、インテリジェントデバイスなどのさまざまなアプリケーションに使用できることを想定している、と論文内で報告しています。
Follow @aurordesign [1] : Luo, C., Tian, B., Liu, Q., Feng, Y., & Wu, W. One‐Step‐Printed, Highly Sensitive, Textile‐Based, Tunable Performance Strain Sensors for Human Motion Detection. Advanced Materials Technologies, 1900925.URL : https://onlinelibrary.wiley.com/doi/10.1002/admt.201900925