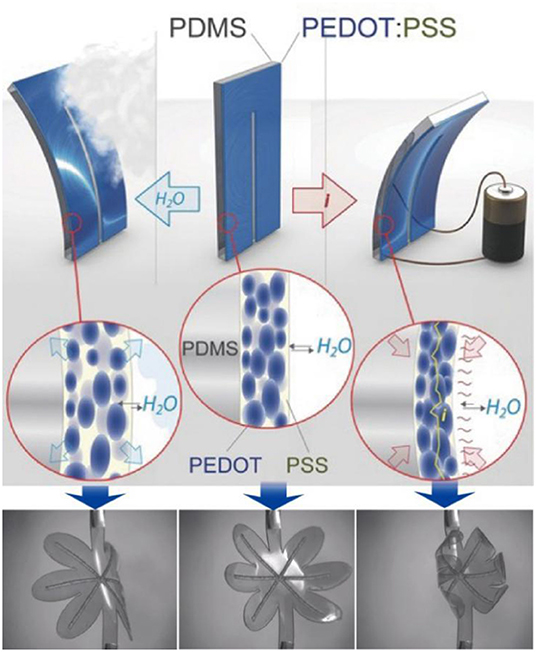
(論文[1]のFigure 2より引用)
導電性ポリマー、特にポリ(3,4-エチレンジオキシチオフェン)(PEDOT)およびそのポリ(スチレンスルホネート)(PEDOT:PSS)との複合体は、ソフトアクチュエータまたは人工筋肉を開発するための有望な材料プラットフォームを提供します。
これまでPEDOT:PSSに関しては多くの研究報告実績があり、特にPEDOTベースのアクチュエータは、バイオニクス、生物医学、スマートテキスタイル、マイクロアクチュエータ、およびその他の機能アプリケーションの分野で利用できると報告事例が多数あります。
他の導電性ポリマーと比較して、PEDOTは高い導電性と化学的安定性、低い密度と動作電圧を提供し、PSSとPEDOTの分散により、溶解性、親水性、加工性、柔軟性の性能がさらに向上し、アクチュエータベースのアプリケーションで有利になります。
しかし、PEDOTベースの材料で製造されたアクチュエータはまだ初期段階にあり、現在および将来の開発のために、より包括的な理解を必要とする多くの未知の要素や課題があります。
江西科技師範大学の研究チームがPEDOT : PSSに関する本レビュー論文を執筆しており、その主目的として、作動メカニズム、性能評価基準、処理技術と構成、および材料開発とアプリケーションの最新の進歩を包括的に理解することとしています。最後に、PEDOTベースのアクチュエータを改善および活用するための将来の機会についても詳しく説明しています。
Follow @aurordesign [1] : Hu, F., Xue, Y., Xu, J., & Lu, B. (2019). PEDOT-based conducting polymer actuators. Frontiers in Robotics and AI, 6, 114.URL : https://www.frontiersin.org/articles/10.3389/frobt.2019.00114/full



