外部の刺激に応答して繰り返し形状変形をしたり、自己推進することができるソフトロボット物質を作成することに関心が高まっています。
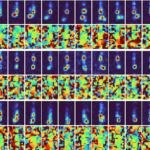
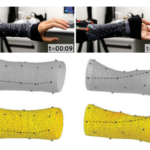
本論文では、すべての液晶分子が一様に同じ方向に向いているネマチックから等方性への転移温度を持つ液晶エラストマーの二重層で構成されるソフトロボット物体を印刷し、相互接続するアクティブヒンジを形成しています。それぞれの動作温度以上に加熱されると、印刷されたヒンジは可逆的な曲げ応答を示します。それらの応答性に関しては、化学的性質とアーキテクチャを変えることでプログラムできるようです。設計と積層造形のアプローチにより、安定した構成を示す多面体の紙や五角形プリズムに組み立てられる「ロールボット」など、受動的に制御された自由なソフトロボット物体を作成しており、論文中で報告しています。
論文中では、ヒンジの化学組成から曲げ角度の温度依存性のデータも載っていますし、自走式ロールロボットの構造についても細かく記載があります。
[1] Kotikian, A., McMahan, C., Davidson, E. C., Muhammad, J. M., Weeks, R. D., Daraio, C., & Lewis, J. A. (2019). Untethered soft robotic matter with passive control of shape morphing and propulsion. Science Robotics, 4(33), Art-NoURL : https://scholar.harvard.edu/files/lewisgroup/files/science_robotics_soft_robotic_matter_.pdf.