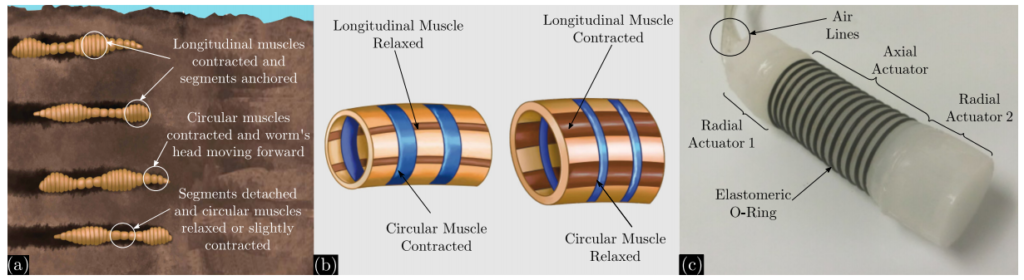
(論文[1]のFigure 1より引用)
南カリフォルニア大学らの研究チームが、ミミズにヒントを得たマルチマテリアルを用いた、マルチアクチュエータソフトロボットの設計、製作、およびフィードバック制御を開発し、その研究成果を2016年度のIEEE International Conference on Robotics and Biomimetics (ROBIO) に寄稿しています。
自然のミミズの体は、四肢が無いにも関わらず、地下の穴を掘ったり地上で動作しています。
ミミズの体は、メタメアと呼ばれる繰り返し変形可能な構造単位で構成されており、個々のメタミアは、動物の神経系によって同時に活性化される円形および縦の筋肉によって動作しています。
本研究では、メタメリックワームの基本的な機能原理を採用して、動きを模倣し、単一の穴を掘るミミズのセグメントの機能を複製する新しい空気圧駆動のソフトロボットシステムを提案しています。
このアプローチの適合性は、3つの基本的な垂直運動、水平運動、斜め運動の移動テストによって実験的に実証されています。材料自体はシリコーンで構成されているようで、今後の研究開発では、医療用カテーテルなどの応用に向け、更にスケールダウンさせたものを制作することを意図しているようです。
Follow @aurordesign [1] : Calderón, A. A., Ugalde, J. C., Zagal, J. C., & Pérez-Arancibia, N. O. (2016, December). Design, fabrication and control of a multi-material-multi-actuator soft robot inspired by burrowing worms. In 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO) (pp. 31-38). IEEE.