ロボットハンドにとって柔らかいモノの把持やハンドリング操作は重要な課題となっています。これまでもセンシングを工夫したり、柔らかい素材や静電吸着を活用するといった様々なアプローチが取られてきました。
今回KAISTらのグループによって提案された人の手の平構造に着想をえた人工皮膚構造はこのような操作に対する一つの有力なアプローチになるかもしれません。
生体の手の平は下の図1のように最表面、内部の脂質部位、その下層にある筋肉と異なる剛性のソフトマテリアルが層状の構造をしています。
柔らかい素材で様々な物質を把持する時には材料自体の変形が問題となりますが、生体の手の平のレイヤー構造は応力に対して適切な弾性変化と、そのセンシング機能により安定した把持を実現していると考えられています。
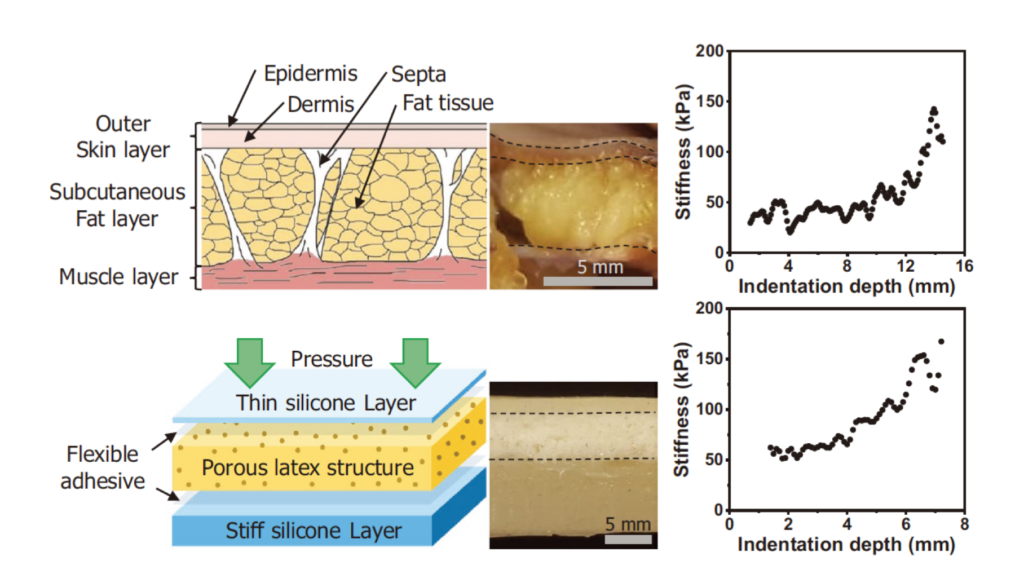
生体皮膚を模倣した人工皮膚の構造(下左)とその剛性特性(下右)
([1]のFigure 1.より引用)
本研究では歪みや変形に対して多孔質状のLatexを中間層に配置することで圧縮と伸長に対して従来、本分野でよく用いられるシリコーンポリマーに対してよりフラットな変形応力特性を実現しています。
本研究ではこの構造により作成したロボットアームの挙動を把持した物体に加えたGrasp Forceと把持の安定性を数値化したStability Indexの2つの指標で評価しています。
また実験とFEMの解析により、物体を握りアームが変形した時に把持領域の端部に生じるWrinkleやBucklingが今回の構造を模倣することで小さく抑えられているといった挙動を確認し、提案手法が把持特性を向上させている理由などについても考察されています。
本研究はAdvanced Functional Materialsに掲載されました。
参考文献
[1]Heo, S. H., Kim, C., Kim, T. S., & Park, H. S. (2020). Human‐Palm‐Inspired Artificial Skin Material Enhances Operational Functionality of Hand Manipulation. Advanced Functional Materials, 2002360.URL
https://onlinelibrary.wiley.com/doi/abs/10.1002/adfm.202002360
Follow @aurordesign


