ポリマー繊維で作られたコイルアクチュエータは、低コストで製造が容易なため、急速に普及しています。残念ながら、信頼性の高いリアルタイムの温度測定は、一般的なアクチュエータの繊維径が小さいために不満を抱いています。
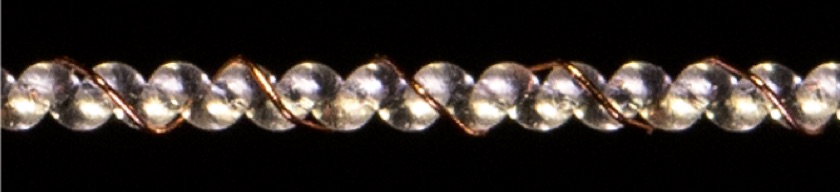
Disney Researchの研究チームは、金属線で包まれたコイル状のポリマー繊維を使用することで、電熱加熱により筋肉を同時に駆動し、ワイヤー抵抗を介して筋肉の温度を監視する能力を実証した、と発表しています。
この簡単な方法により、これらの筋肉の便利な過熱を回避することができ、閉ループ温度制御が可能になるそうです。このプラットフォームを使用して、温度と位置のフィードバックを使用して収縮速度を改善し、総出力を増加させるさまざまな構成の冷却速度を調査するネストされたコントローラーを示します。
これらの温度測定を使用して、力と機械的出力を増加させるために、スケーリングと筋肉結束の影響も調査しました。繊維の直径を大きくすると力の出力が増加しますが、熱伝導により、繊維の直径に関係なく、単一の筋肉の可能な出力が最終的に制限されます。束ねることにより、力と出力の両方を向上させることができますが、やはり熱の考慮が束密度を制限します。驚くことではないが、これは効率的な冷却と総表面積の最大化の必要性を物語っています。
将来的に、コイル状ポリマー人工筋肉を可能にし、筋肉の過熱のリスクを排除し、最終的にロボットおよびメカトロニクス用途でのこれらの人工筋肉の使用を促進することを願っていると締めくくっています。
Follow @aurordesign [1] : Haines, C. S., & Niemeyer, G. (2018, October). Closed-loop temperature control of nylon artificial muscles. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 6980-6985). IEEE.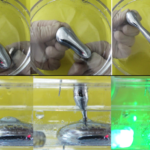


-150x150.png)