EPFLの研究チームが、昆虫によって進化した生体力学的戦略を使用した衝突に強いクワッドコプターの設計と実証実験について発表し、その結果を2017年度のIEEE Robotics and Automationに寄稿しています。
ドローンの使いやすさと汎用性は、娯楽から捜索や救助まで、いくつかの分野での展開に貢献しています。 ただし、ドローンは、パイロットのミスやさまざまなシステム障害による衝突に対して脆弱なままです。
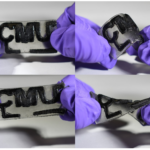
本論文で提唱している衝突に強い昆虫の翼の生体力学的戦略を抽象化したクワッドコプターは、飛行エンベロープ内の空力的負荷に強固に耐える二重剛性フレームを備えていますが、損傷を避けるために衝突中に柔らかく折りたたむことができるそうです。
二重剛性フレームは、中央ケースに収容されているドローンの敏感なコンポーネントを保護する特定のエネルギー吸収材料と相乗効果を発揮しており、提案しているアプローチは、高速衝突に耐えることができる50gクワッドコプターで検証されています。
提唱しているアプローチにより、剛性材料と軟質材料の両方の利点を単一のデバイスに結合して、その汎用性と機能性を高めることができると主張しており、このソリューションは、損傷を軽減するために柔らかくする必要がある他の移動ロボットまたはマニピュレーターにとっても有用だと締めくくっています。
Follow @aurordesign [1] : Mintchev, S., de Rivaz, S., & Floreano, D. (2017). Insect-inspired mechanical resilience for multicopters. IEEE Robotics and automation letters, 2(3), 1248-1255.