University of Mary とUnivesity of Utahらのグループによって、3Dプリントしたソフトアクチュエータを機会学習によってコントロールする手法がScientific Reportに報告されました。
今回提案された技術ではIPMC(Ionic Polymer-metal Composite)と呼ばれるタイプのソフトアクチュエータが用いられています。
IPMCは柔らかいアクチュエータや人工筋肉と呼ばれる分野の手法と一つで、二つの電極の間にイオンを含ませたポリマー層から構成されています。電圧を加えると電界により内部のイオンが移動し、その際に生じる膨潤度の違いにより屈曲するアクチュエータです。
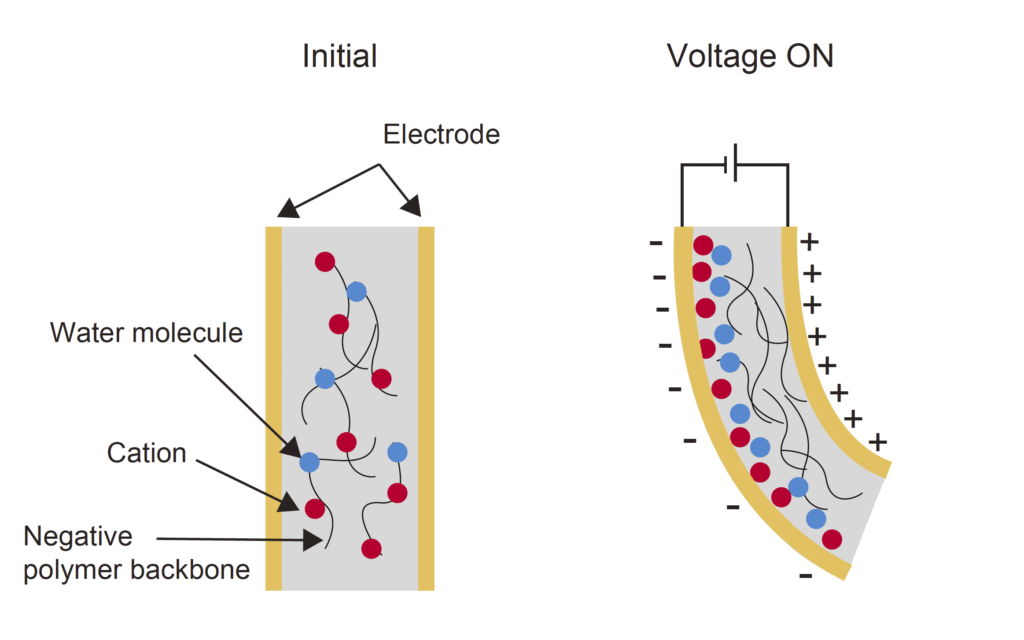
また、この時の抵抗値の変化などからセンサとしても用いることも可能です。1.5Vほどの低い電圧で駆動することができ音を立てずにしなやかな動きが作れることから、魚型のロボットなどがこれまでにも試作されています。
今回の論文では下のFigの手順で3Dプリントを活用してアクチュエータの構造体を作っています。
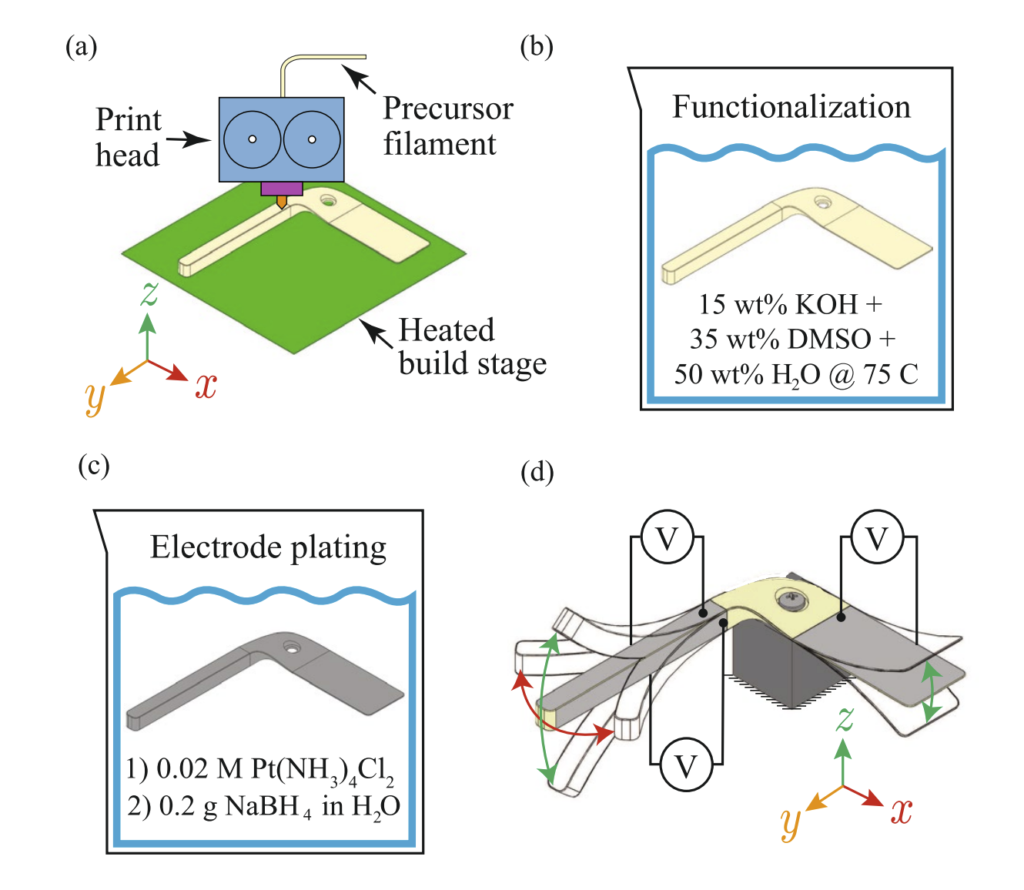
はじめに、IPMCの前駆体となる部分を3Dプリンタにより構成します。続いて、このように造形した物体を化学処理を行い、アクチュエータとして機能するように処理します。そしてメッキ処理処理を行うことで表面で電極を構築することで任意の形状のIPMCアクチュエータを構築します。

まだ最終プロセスまで全てを3Dプリンティングできるわけではないですが、シンプルな構成のIPMCを活かした製造プロセスになっています。
また本論文ではこのように形成したIPMCを等価回路に置き換え、そこで派生した電流の値を元に力を計算し、一般マクスウェルモデルと機構の情報を用いて変形量に変換するというモデルを提案しています。
今回は芋虫の体を参考にリング状の構造体を組み合わせて、その変形量から動きを作るという試みをしています。
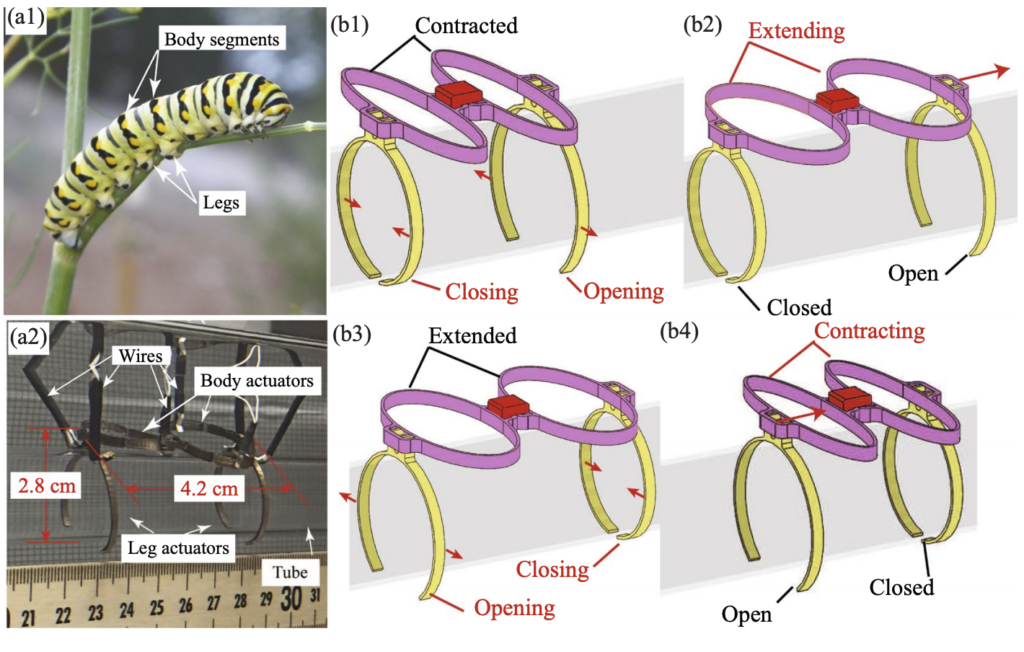
ボディと脚部のアクチュエータの位相をコントロールすることでCrawling Robotの動きを作るために、今回はMachine Learningによるモデルを取り入れています。
Bayesianによる最適化を試みました。その結果、Simulation上では、Policy Gradient Methodによるコントロール手法に比べて少ない訓練数で所望の動きが得られています。また過去のDynamics Modelをとい入れることでより少ない回数で収束することが示唆されました。
一方で実際に作成したロボットの実験ではSimulationに対するパフォーマンスの低下が見られたようです。しかし、それでもなおBeyesianによる最適化は連続的な試行時には継続的なパフォーマンスの向上が見られています。
今回の発表は3DプリントによるIPMCの構築とそのコントロールのための機械学習の適用の可能性について探るための試みと言えるでしょう。実機でのずれなども存在していますが、複雑な系においてデジタルファブリケーション と機械学習を上手く組み合わせることで従来のアクチュエータと制御システムでは難しいような動きも段々と可能になってくるかもしれないですね。
参考文献:
[1]Carrico, J. D., Hermans, T., Kim, K. J., & Leang, K. K. (2019). 3D-Printing and Machine Learning Control of Soft Ionic Polymer-Metal Composite Actuators. Scientific reports, 9(1), 1-17.URL: https://www.nature.com/articles/s41598-019-53570-y