柔らかい筐体材料や機構から構成されるソフトロボットが近年盛んに研究されております。2018年からはRobosoftという専門の国際会議が発足されたり、JSTの新学術領域ではソフトロボット学がスタートしたりとより多くの注目を集めています。
本研究では、このような柔らかいロボットの駆動源となり得る伸縮可能なポンプ技術を提案し、その研究成果がNatureに掲載されました。
このポンプは電気流体力学現象(Electrohydrodynamics: EHD)と呼ばれる電界に応答して、液体が泳動する現象を用いています。今回EPFLと芝浦工業大学らのグループはこのEHD Pumpをシリコーンエラストマーと伸縮性の電極材料を用いることでポンプ自体を伸縮可能にしています。
空気圧ポンプや流体ポンプなどは駆動部と駆動源を離して配置しても、動作させることができるという利点を有しています。しかし、柔軟性を確保するには硬いポンプを外部に設置することが課題となっていました。今回提案された伸縮性のポンプは従来のポンプと体積や重量当たりの圧力や流量はほぼ同等のレベルを実現しており、系自体が柔らかい物質で構成されているのでソフトロボットの内部への組み込みやウェアラブルデバイスへの応用などが期待されます。
実際に論文中でソフトロボットへの組み込みやグローブ型のWearable Cooling Systemといったアイディアが提案されています。
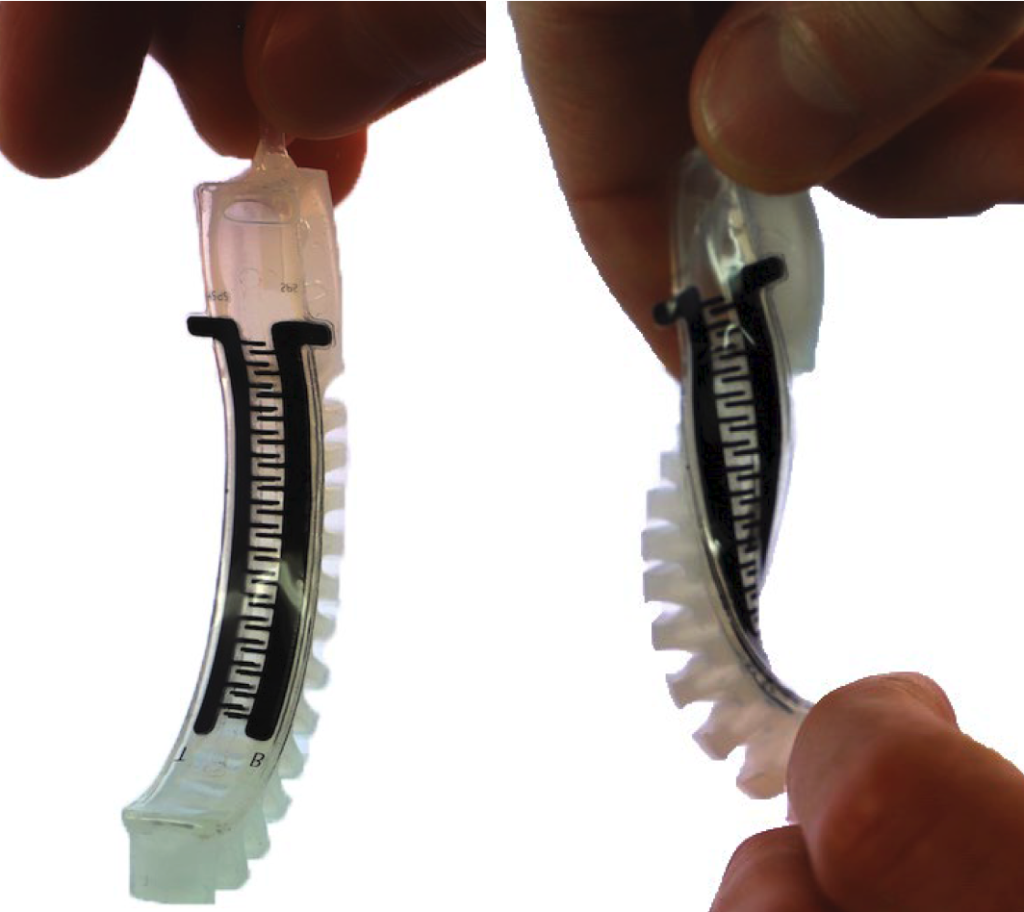
([1]のFig.4より引用)
EHDポンプ自体は1960年代にすでに論文としても発表されており、2000年代前半などにCPUの冷却システムなどで様々なデバイスの研究がなされてきました。[2]
EHDポンプは10MV/m程度の電界強度を必要とするため通常は小型化して低電圧で駆動させる方向で開発を進めるケースが多かったですが今回の論文ではこの技術をスケールは大きいままに、別の材料系とアプリケーションで展開したこと、そして他のソリューションとの比較を丁寧に行なったことがユニークかと思います。
今後も柔らかいセンサやアクチュエータを用いたソフトロボットやウェアラブルの開発が盛り上がりそうです。
[1]:Cacucciolo, V., Shintake, J., Kuwajima, Y., Maeda, S., Floreano, D., & Shea, H. (2019). Stretchable pumps for soft machines. Nature, 572(7770), 516-519. [2]Fylladitakis, E. D., Theodoridis, M. P., & Moronis, A. X. (2014). Review on the history, research, and applications of electrohydrodynamics. IEEE Transactions on Plasma Science, 42(2), 358-375.