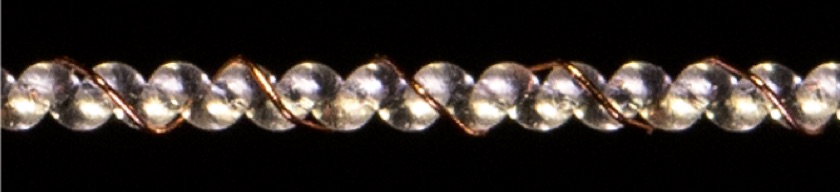
MITの研究チームが開発した電気接続されたダイオードファイバー
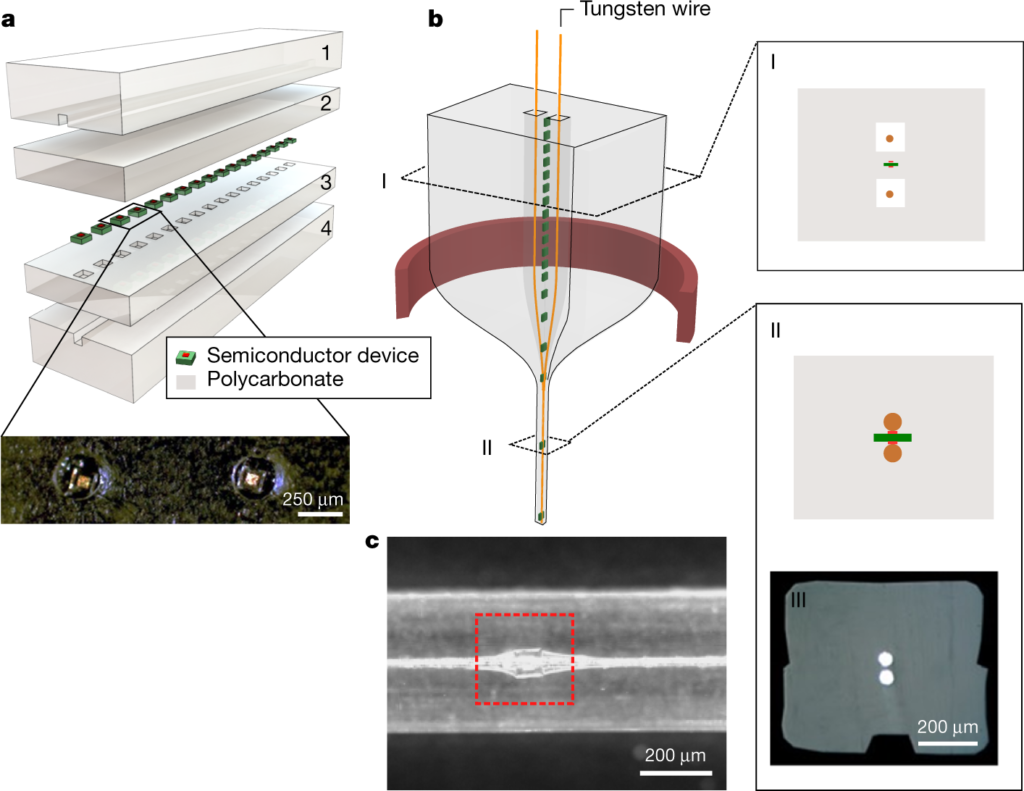
(論文[1]のFIgure 1より引用)
半導体ダイオードは、計算、通信、センシングなどに使用されており、我々の生活には必須な基本的な構成要素です。半導体自体を、テキスタイルグレードのファイバーに組み込むと、ファブリックの機能と機能を向上させることができます。
例えば、ファブリックベースの通信や生理学的モニタリングを含むことができます。しかし、これまでのところ、処理の課題により、熱的に引き出された繊維で高品質の半導体ダイオードを実現することはできませんでした。
MITの研究チームは、電気的に接続されたダイオードファイバーのスケーラブルな熱延伸プロセスを開発し、その研究成果をNatureに寄稿しています。
プロセスとしては、まず、導電性の銅またはタングステンワイヤが供給される中空のチャネルと一緒に、構造内部の個別のダイオードをホストするプリフォーム構造を作ります。
プリフォームが加熱されて繊維に引き込まれると、導線が電気的に接触するまでダイオードに近づき、数百のダイオードが単一の繊維内で並列に接続されます。
論文中で紹介されているように、2つのタイプのファイバー内デバイスである発光ダイオードと光検出ダイオードを実現した、と報告しています。
デバイス間の間隔が20センチメートル未満であり、光のコリメーションとファイバークラッドで設計されたレンズによる集光が実現されています。ダイオードファイバーは、洗濯機での10回の洗濯サイクルを通して性能を維持し、アパレルアプリケーションへのこのアプローチの関連性を示していると報告しています。
このアプローチの有用性を実証するために、レシーバー、エミッタファイバーを含む2つのファブリック間に、3メガヘルツの双方向光通信リンクを確立しています。また、ダイオードを使用した心拍数測定は、すべてのファブリックの生理学的状態監視システムでの実装の可能性を示しています。
本論文で示しているアプローチは、繊維を用いることで衣服が持つ機能をアップデートするための道を提供すると主張しており、繊維の「ムーアの法則」の可能性を示す、という締めくくりをしています。
URL : https://www.nature.com/articles/s41586-018-0390-x#Abs1