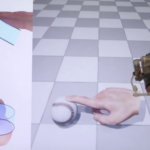
(動画より抜粋)
ジョージ・M・ホワイトサイズ研究所の研究チームは、ロボットを構築するために必要な最後のハード部品のソフト交換部品を発明し、その研究成果をScience Roboticsに寄稿しました。
電気とワイヤーの代わりに、加圧空気がゴム製インフレータブルを伸縮させて動きを作り出し、ソフトバルブがハード部分を引き継ぎ、ソフトデジタルロジックがコンピューターと同じ機能をするそうです。
複数のソフトな空気圧アクチュエータの定期的な作動には、複数の別個のコンポーネントの協調機能が必要です。
本研究は、ハードバルブや電子制御なしで、単一の定圧源を使用して、ソフトアクチュエーターで一時的に調整された周期運動を誘発するソフトな空気圧リング発振器を示しています。
このリング発振器の基本単位は、エラストマー構造の2つの不安定性を使用して2つの状態(「オン」と「オフ」)を切り替えるソフト空気圧インバーターです。
論文中ではこのソフトリング発振器を利用した、回転するソフトロボットも紹介しており、これらの振動出力圧力は、ソフトロボットの波状運動と回転運動、サイズに基づく粒子分離、空気圧機械療法、および流体の計量など、いくつかのアプリケーションを可能にします。ソフトリングオシレーターは、これらのアプリケーションでのハードバルブと電子制御の必要性を排除する、と主張しています。
[1] : https://www.eurekalert.org/pub_releases/2019-06/hu-srf062119.php [2] : Preston, D. J., Jiang, H. J., Sanchez, V., Rothemund, P., Rawson, J., Nemitz, M. P., … & Whitesides, G. M. (2019). A soft ring oscillator. Science Robotics, 4(31), eaaw5496.