本論文は、Harvard大学のWyss InstituteとJohn A.Paulson School of Engineering and Applied Science(通称SEAS)らを要する研究者チームが発表した、海洋生物を掴むことができるソフトロボットに関する内容です。
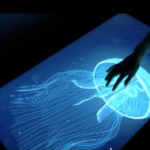
今回報告された論文は、ゼラチン状の海洋生物の繊細なサンプルをつかむことができる、非常に柔らかいソフトロボットアクチュエータを紹介しています。
最先端のソフトロボットマニピュレーターは、深海でサンゴやナマコなどを優しくつかむことを実証していますが、より壊れやすいソフトボディの生物、例えばクラゲなどを掴むことはできていませんでした。ご存知のように、クラゲの体はゼラチン状の海洋生物であり、非常に繊細な刺胞動物の一種です。
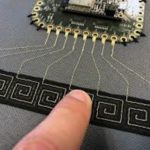
今回、設計パラメーターの調査と個々のアクチュエーターの検証により、研究チームによって開発されたナノファイバー強化ソフトアクチュエーターは、十分に低い接触圧力を適用し、クラゲ種への害を最小限に抑えることを確認しています。
論文中に記載があるように、プロトタイプグリッパーを使用して、クラゲのサンプリングを行っています。
クラゲのような、より繊細な海洋生物を掴めるグリッパーが開発されたことで、こういった生物の活動習慣にストレスを与えることなく観察することができるようになることが期待されています。
深海生物や海洋生物の生態学的および遺伝的特徴を研究するために使用される評価技術が進化する可能性を示唆しています。
URL : https://robotics.sciencemag.org/content/4/33/eaax5425?rss=1