本論文は、Wyss InstituteとHarvard SEAS(John A.Paulson School of Engineering and Applied Science)の研究者たちが開発した、ソフトマテリアルで製作したロボティクスに関する論文です。
研究背景であるソフトロボティクスの分野で研究しているロボティクスは、柔軟で有機的な構造と、生物の動きを模倣しようとしています。というのも、元々人間は、手先の器用さ、運動能力、および体性感覚システムによって提供されるフィードバックに依存する他の身体能力を持っており、従来の剛性材料を使用したロボットには表現できない繊細さを表現することが求められているためです。
本論文では、マルチマテリアルの埋め込み3D印刷を介して、ソフトソマトセンシティブアクチュエータ(SSA)と呼ばれるセンサーの複雑なネットワークから構成されるソフトロボットアクチュエータを作成する方法を報告しています。
この新しい製造アプローチにより、エラストマーマトリックス内に複数のイオン伝導性および流体性の特徴をシームレスに統合して、所望の生態系を模倣したセンシングおよび動作機能を備えたアクチュエータを製造できる、と主張しています。
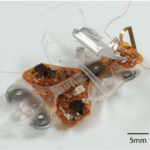
また、複数のアクチュエータを組み合わせることで、ソフトロボットグリッパーに組み込まれ、埋め込まれた湾曲、膨張、および接触センサー(深部および精密接触センサーを含む)を介して触覚フィードバックを提供しています。この様子は動画内でも紹介されています。
こういったソフトマルチマテリアルの需要は非常に高いと想像され、今回の製造プラットフォームにより、複雑なセンシングモチーフをソフトアクチュエーティングシステムに簡単に統合できる、と論文では主張しており、ソフトロボット、機械、および触覚デバイスのフィードバック制御に向けた必要なステップでもある、と報告しています。
[1] : Truby, R. L., Wehner, M., Grosskopf, A. K., Vogt, D. M., Uzel, S. G., Wood, R. J., & Lewis, J. A. (2018). Soft somatosensitive actuators via embedded 3D printing. Advanced Materials, 30(15), 1706383.URL : https://onlinelibrary.wiley.com/doi/full/10.1002/adma.201706383