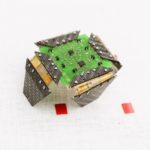
ETHチューリッヒ校らの研究チームが、柔らかい表面に適用される接触力の分布に関する情報を提供するマルチカメラ光触覚センサーの設計開発を行い、その研究成果をRoboSoftに寄稿しています。
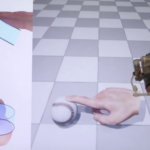
接触力分布は、表面に広がる球形の粒子の動きで検出することが可能であり、力を受けると変形します。 小さな埋め込みカメラは、さまざまな粒子パターンの画像をキャプチャし、畳み込みニューラルネットワークを用いた機械学習アーキテクチャを通じて3次元の接触力分布にマッピングされます。
この論文で提案している設計は、ミラーなどの追加の反射コンポーネントを使用せずに、既存のほとんどのカメラベースの触覚センサーよりも大きな接触面と薄い構造を示しています。 ロボットスキンなどのより大きな表面へのスケーラビリティを容易にする学習アーキテクチャのモジュール式実装について論文で紹介しています。
Follow @aurordesign [1] : Trueeb, C., Sferrazza, C., & D’Andrea, R. (2020, May). Towards vision-based robotic skins: a data-driven, multi-camera tactile sensor. In 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft) (pp. 333-338). IEEE.