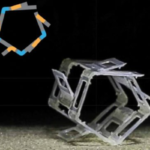
Harvard John A. Paulson School of Engineering and Applied Science(SEAS)とWyss Institute for Biologically Inspired Engineeringの研究者は、柔らかい人工筋肉を搭載した弾力性のあるRoboBeeを開発したと発表しました。
Robobeeは壁に衝突したり、床に落ちたり、損傷を受けずに他のRoboBeesと衝突したりできるマイクロロボットであり、制御された飛行を達成するためのソフトアクチュエータを搭載した最初のロボットと主張しています。
本論文中では、既存のソフトアクチュエーターにおいては、リフトオフを達成するのに十分な電力密度をまだ実現できておらず、課題があるとし、今回発表したRoboBeeはは、多層誘電エラストマーアクチュエータによって駆動しているそうです。同時に、これらのロボットは、周囲の障害物との衝突を感知することができ、損傷を引き起こすことなく、壁や互いに衝突するとコメントしています。
「マイクロロボットの分野では、非常に弾力性が高いため、移動ロボットをソフトアクチュエータから作成するという大きな推進力がありました」と、SEASの元大学院生でポスドクの研究員で論文の筆者はコメントしており、さらに 「しかし、現場の多くの人々は、これらのアクチュエータの出力密度が十分に高くなく、制御が難しいことで悪名高いため、飛行ロボットに使用できることに懐疑的です。当社のアクチュエータは、ホバリング飛行を達成するのに十分な高出力密度と制御性を備えています。」ともコメントしています。
次世代のアジャイルソフトロボットを開発する可能性を示しており、ますます軽いソフトロボットの実現が可能になる世界観を示してくれています。本論文はNatureに掲載されております。
[1] : Chen, Y., Zhao, H., Mao, J., Chirarattananon, P., Helbling, E. F., Hyun, N. S. P., … & Wood, R. J. (2019). Controlled flight of a microrobot powered by soft artificial muscles. Nature, 1-6.