有機半導体材料のナノ構造アレイに基づく電界効果トランジスタの開発
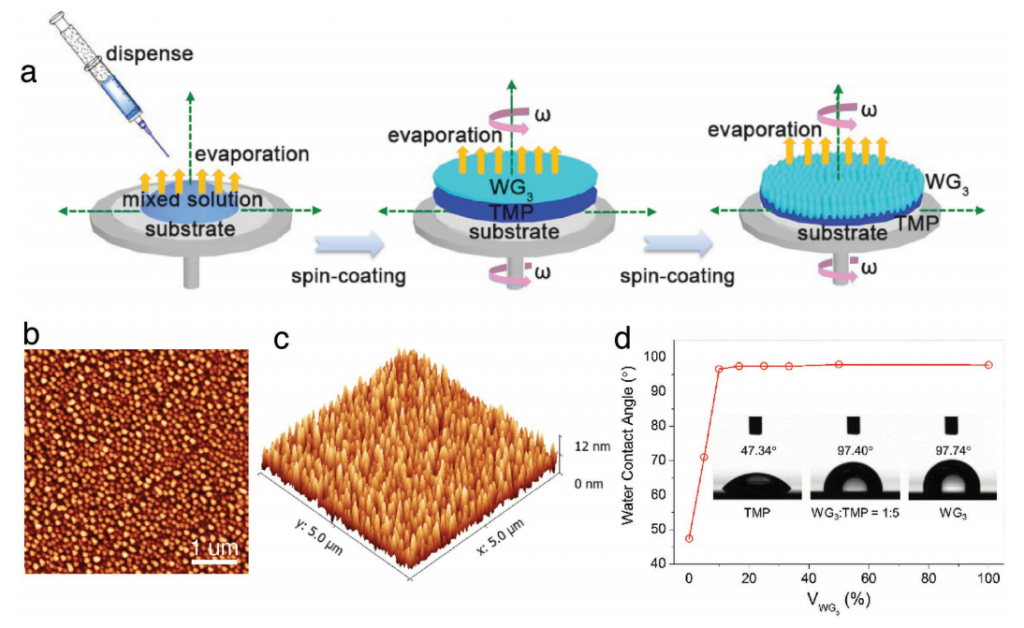
(論文[1]におけるFigure 1より引用)
南京郵電大学の研究チームが、ワイドバンドギャップ(WBG)分子有機半導体材料の絶縁および秩序化ナノ構造アレイに基づく有機電界効果トランジスタ(OFET)メモリデバイスの開発[2-(9-(4-(オクチルオキシ)フェニル)-9H-フルオレン-2-イル)チオフェン] 3(WG3)を発表しています。
WG3ナノ構造は、WG3 /トリメチロールプロパン(TMP)の混合溶液をスピンコーティングすることにより相分離から調製され、不揮発性OFETメモリデバイスの電荷蓄積素子として生成するそうです。
滑らかなWG3フィルムを備えたOFETメモリデバイスと比較して、WG3ナノ構造アレイに基づくデバイスは、メモリウィンドウの拡大(約45 V)、スイッチング速度の高速化(約1秒)、安定した保持能力(> 104秒)などのメモリパフォーマンスの大幅な改善を示したと報告しています。
WG3 NSsの形態の定量的研究により、強化されたメモリ性能は、WG3 NSsとペンタセン層の間の接触面積の増加によって引き起こされる電荷トラップ/電荷励起子消滅効率の改善に起因することが明らかになりました。チャージトラップサイトとしてWG3 NSsアレイを準備するためのこの多用途のソリューション処理アプローチにより、広範囲のWBG有機半導体材料に適用可能な高性能不揮発性OFETメモリデバイスの製造が可能になる、と主張しています。
Follow @aurordesign [1] : Li, W., Guo, F., Ling, H., Liu, H., Yi, M., Zhang, P., … & Huang, W. (2018). Solution‐Processed Wide‐Bandgap Organic Semiconductor Nanostructures Arrays for Nonvolatile Organic Field‐Effect Transistor Memory. Small, 14(2), 1701437.URL : https://onlinelibrary.wiley.com/doi/abs/10.1002/smll.201701437
