固体電池の課題と最新の研究内容に関するReview論文
本論文は2019年にNature Materialsに寄稿された固体電池に関するReview論文です。
持続可能なエネルギーにおける重要な分野として、固体電池は昔から注目を集めています。潜在的な安全性、エネルギー密度、サイクル寿命の利点があるためです。
本レビューでは、固体電池コンセプトの中心にある無機固体電解質の基本的な理解における最近の進歩について、マルチスケールイオン輸送、電気化学的および機械的特性、および電流処理ルートの分野における重要な問題を扱いながら説明してくれています。実用的な固体デバイスの主な電解質関連の課題には、金属アノードの使用、界面の安定化、物理的接触の維持、固体電解質材料の基礎となる特性に関する知識の獲得に依存する解決策が含まれる、と記述しています。
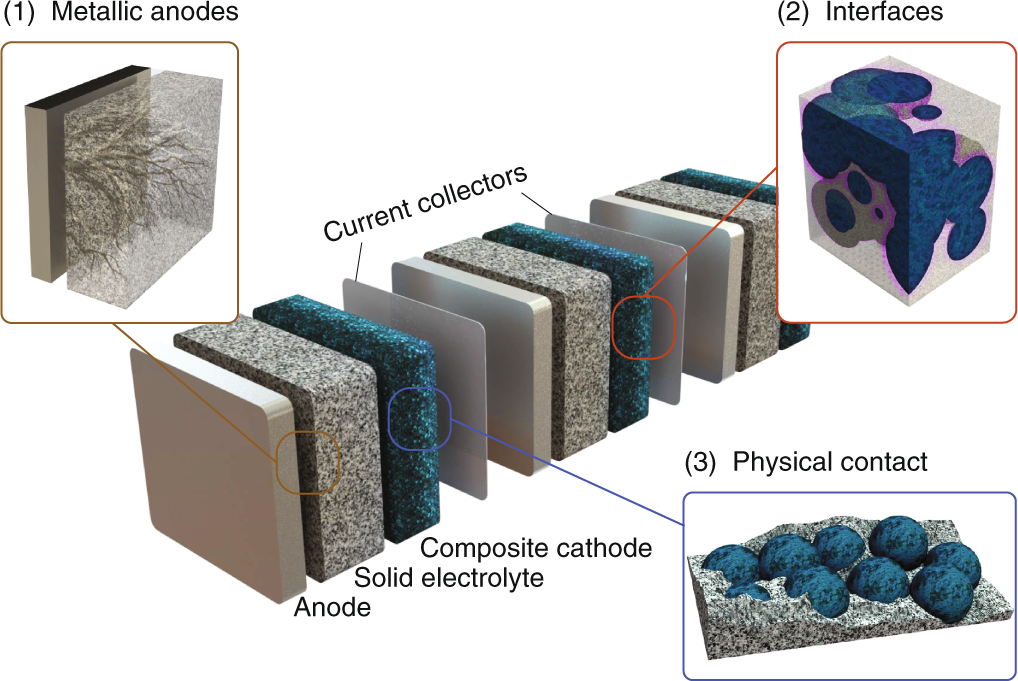
図に示すように、固体電池における重要な課題は不均一金属の体積、界面の形成および接触による損失が挙げられ、これらの課題を解決するための最先端の知識を集約したReview論文になっているため、興味がある方は是非ご一読ください。
個人的には、非常に図がわかりやすいと感じましたが、特に論文中にある固体電池の製作プロセスにおけるフローチャートは、一見の価値があると感じています。他のデバイス製作にも応用可能な表現方法で、視認性が高いものとなっています。
[1] : Famprikis, T., Canepa, P., Dawson, J. A., Islam, M. S., & Masquelier, C. (2019). Fundamentals of inorganic solid-state electrolytes for batteries. Nature materials, 1-14.