液体中に自由な3D構造を作る3Dプリンティング技術
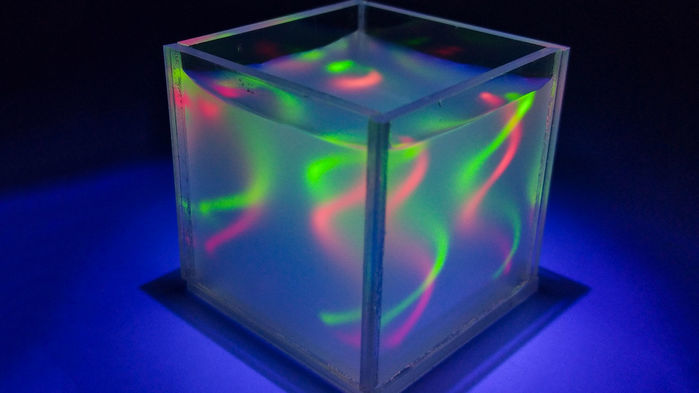
水性の微細構造は、その表面が球状に収縮する傾向があるため、作成や処理、および保存が困難です。
本論文では、配合された水性の2相システム(ATPS)を使用した、複雑な自由な3次元(3D)全液体アーキテクチャが生成できることを実証しています。この生成方法では自由な形状を作ることが可能になるため、動脈、尿道カテーテル、気管などの複雑な組織様構造のバイオプリンティングを可能にしてくれます。
ポリマー間の水素結合相互作用を利用することにより、印刷された水性/水性の再構成可能な3Dアーキテクチャは、界面の非共有膜によって数週間安定化できるとのことです。異なる細胞を個別に区画化されたバイオインクおよびマトリックスと組み合わせて、血管ネットワークを使用したりできるなど、テーラーデザインのマイクロ構造体を作ることができます。 幅広い天然および合成親水性ポリマーの中から無限の配合を設計できるため、この印刷アプローチは、再生医療での潜在的な用途向けに、生体模倣の動的な組織様構造を設計するのに役立つ場合があると主張しています。
[1] Luo, G., Yu, Y., Yuan, Y., Chen, X., Liu, Z., & Kong, T. (2019). Freeform, Reconfigurable Embedded Printing of All‐Aqueous 3D Architectures. Advanced Materials, 1904631.論文URL:https://onlinelibrary.wiley.com/doi/10.1002/adma.201904631