3次元螺旋構造の導電ファイバーによる洗濯できるウェアラブル
非常に安価でありながら洗濯にも耐えられるウェアラブル用の伸縮導電ファイバーが提案されAdvanced Materialsに掲載されました[1]。
ウェアラブルやソフトロボットなどの領域に置いて伸縮性を有する導電のファイバーは重要なコンポーネントです。大きく分けて素材そのものを伸縮性にするアプローチと硬い素材の構造を工夫することで柔らかくするといったアプローチが取られています。
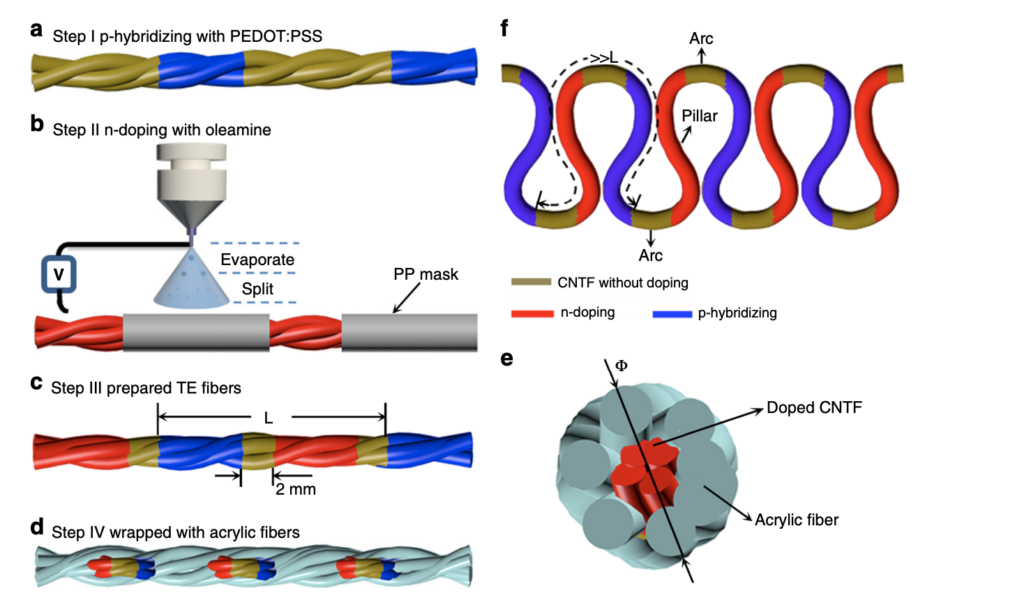
今回Wuyi Universityらによって提案された手法はファイバーを三次元の螺旋構造にすることで伸縮性を実現しています。図1の様に銅のファイバと伸縮性のPUファイバーを用意しています。ポリウレタンのみ伸長させた状態で銅ファイバーと接続し、コーティングしてから応力を解放することで自然と3次元の螺旋構造を形成するというアプローチを取っています。
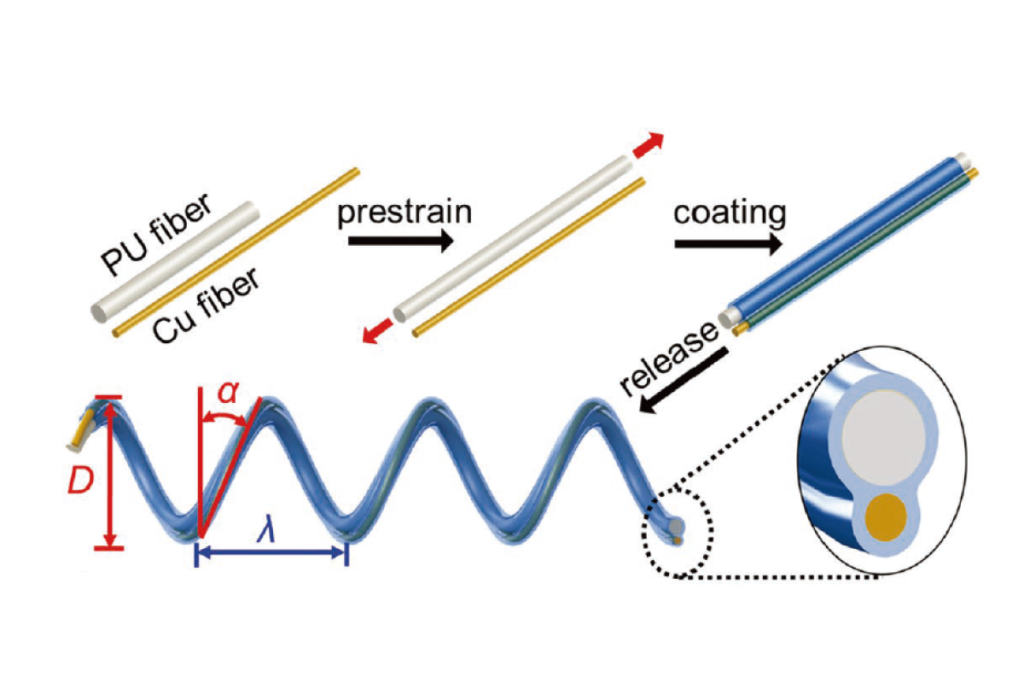
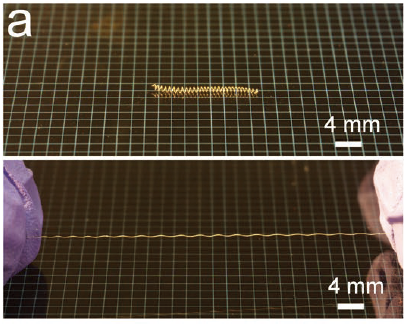
論文中では初期のテンションに対する構成された螺旋の径や角度、そして物性などを取得しています。素材自体を伸縮性にするアプローチと比べて、この手法の場合は螺旋の構造が伸びきるまではほぼ金属の初期状態の導電を維持しています。
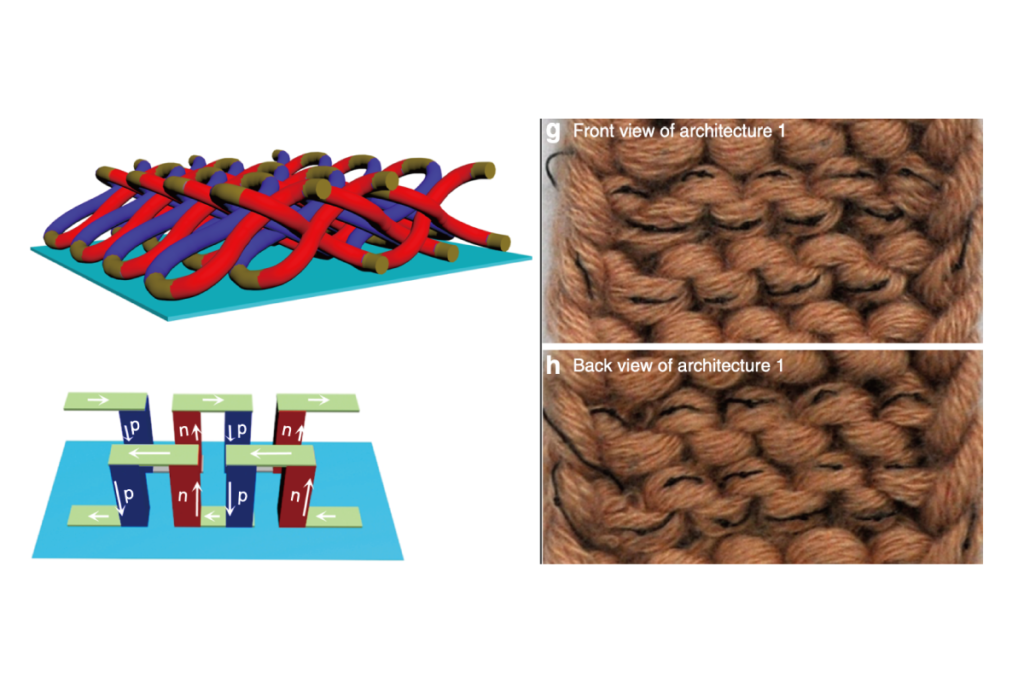
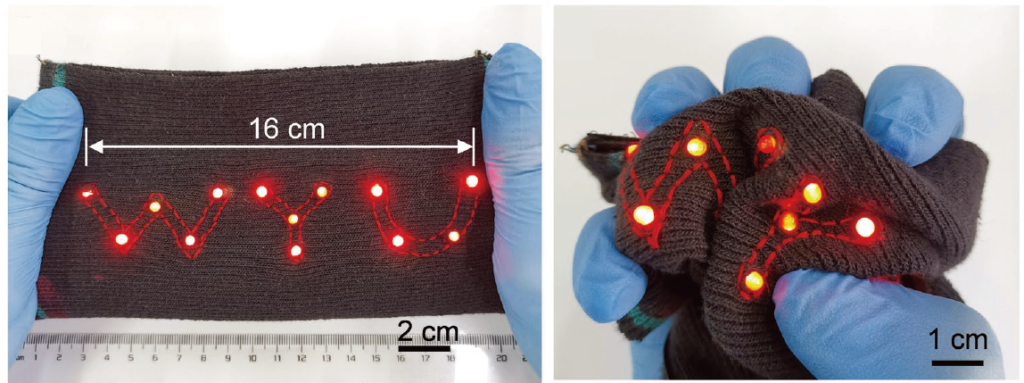
また本論文ではこの糸を編み込んでその特性を調べています。見た目にはほとんどわからない形で導電パスが構築できていることや編み物の硬さにほとんど影響を与えていないことを、S-Sカーブの測定などで示しています。
素材自体が非常に汎用的なもので耐久性もあるためとても有効なアプローチになりそうですね。
参考文献
[1]Yang, Z., Zhai, Z., Song, Z., Wu, Y., Liang, J., Shan, Y., … Jiang, H. (2020). Conductive and Elastic 3D Helical Fibers for Use in Washable and Wearable Electronics. Advanced Materials, 1907495, 1907495. https://doi.org/10.1002/adma.201907495