3D印刷可能な導電性ポリマー複合材料の開発と物性評価
人工皮膚や触覚センサーなどの柔らかく伸縮性のあるセンサーは、素材のコンプライアンスが低いため、多くの柔らかなロボットアプリケーションにとって魅力的です。導電性ポリマーは多くのソフトセンサーに必要なコンポーネントです。
カーネギーメロン大学らの研究チームが、3D印刷可能な導電性ポリマー複合材料を用いて、複合材料の3D印刷を行い、その物質における電気機械的特性を示し、成果をRoboSoftに寄稿しています。
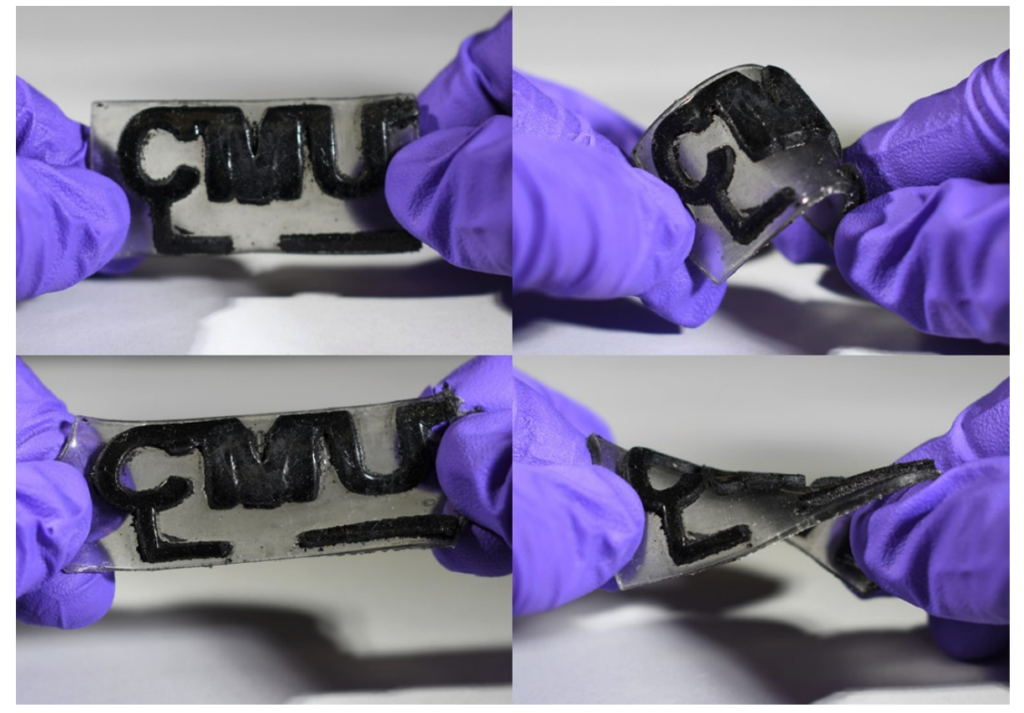
犬の骨の形をしたサンプルは、デジタルライトプロセッシング(DLP)ベースの3Dプリンターを使用しているそうです。この技術で3D印刷可能な樹脂は、モノマー、架橋剤、導電性ナノフィラー、および光開始剤で構成されています。特性評価は、最初に、2つの異なる架橋剤の影響を異なる組成で調査し、次に、導電性ナノフィラーの濃度の影響を調査しています。以前の研究を参考にして架橋剤を選択し、導電性ナノフィラーとしてカーボンナノチューブ(CNT)を利用し、サンプルは3D印刷を行なった後、電気機械テストセットアップを使用して特性評価されています。
論文中で紹介しているアプリケーション事例として、3D印刷されたソフトロボットの有用性を示すために、導電性樹脂と非導電性樹脂の両方で構成される静電容量ベースのジョイスティックセンサーが3D印刷されています。
Follow @aurordesign [1] : Kim, S., Kim, S., Majditehran, H., Patel, D. K., Majidi, C., & Bergbreiter, S. (2020, May). Electromechanical Characterization of 3D Printable Conductive Elastomer for Soft Robotics. In 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft) (pp. 318-324). IEEE.