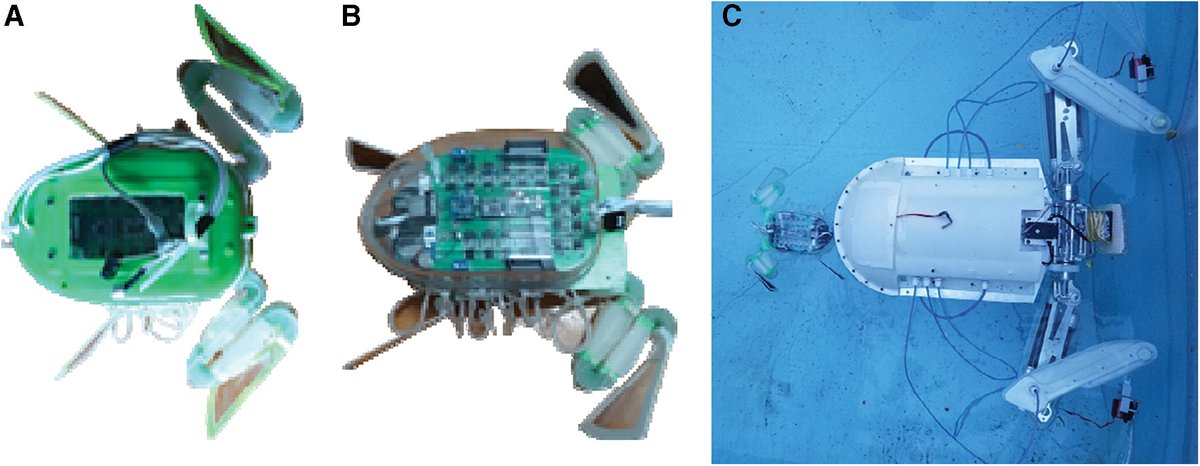
(論文[1]のFigure 7より引用)
ハルビン工業大学の研究チームが、カエルに触発された水泳ソフトロボットを開発し、その成果を2020年度のSoft Roboticsに寄稿しています。
ロボットの関節は、関節式の空気圧ソフトアクチュエータでできており、このソフトアクチュエータは、カエルの生物学的構造と四肢の動きの特性を研究することによって設計および準備したそうです。
運動学的モデルに基づいてロボットの概略的な四肢運動図を作成し、設計スキームは複合制御システムによって決定しており、胴体サイズは0.175・0.100・0.060mで、カエルをイメージした水泳ロボットの小型化を実現したとしています。
実験結果は、直線運動中の平均回転速度が0.075 m / s、平均回転速度が15 / sであることを示したそうで、ロボットの構造設計の合理性と制御システムの正当性は、プロトタイプ実験によって検証したとしています。