本論文は、Korea Advanced Institute of Science and Technology(通称KAIST)のナノ工学研究チームらが発表し、2019年8月にScience Advancesに寄稿されたものです。
既存のイオン人工筋肉には、応答速度の大幅な向上、曲げひずみの増加、耐久性の向上のために、技術革新が必要です。
本論文では、イオン架橋Ti3C2TxとPEDOT:PSSで構成されるMXene人工筋肉を報告し、1秒以内の超高速立ち上がり時間を示したと報告しています。MXene自体は、Ti(チタン)やC(炭素)で構成される2次元ナノ導電性材料の総称です。MXeneに関しては、過去記事で紹介しています。
今回KAISTの研究チームが発表したイオン人工筋肉は、DC応答、非常に低い入力電圧領域(0.1〜1 V)で最大1.37%の非常に大きな曲げ歪み、最大18,000サイクルまで97%の長期サイクル安定性、位相遅延の大幅な低減、最大20Hzの周波数帯域の電気刺激の下で層間剥離のない良好な構造的信頼性を持つそうです。
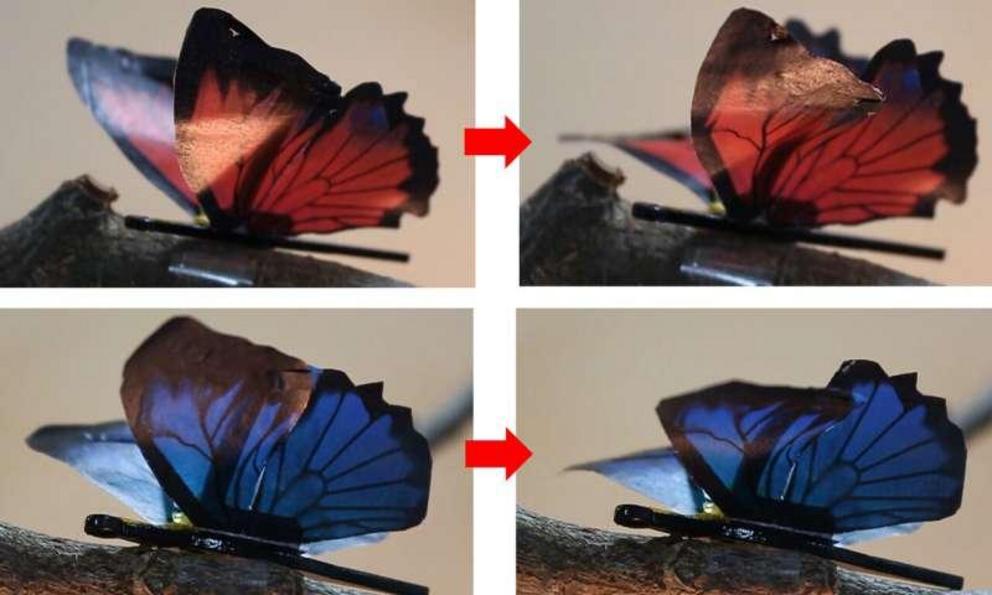
また論文中には複数のアプリケーションが提示されており、折り紙にインスパイアされた水仙の花ロボットや、着用可能なブローチ、蝶、木の葉といったアート要素を取り入れたデモンストレーションなどが紹介されており、他の人工筋肉の研究が行うアプリケーション事例とは少し違う観点で書かれています。
今後の技術進化によって、ウェアラブルエレクトロニクスや運動アート作品を含む次世代のソフトロボットデバイス用のMXeneベースのソフトアクチュエータの幅広い可能性に期待できるかもしれません。
[1] : Umrao, S., Tabassian, R., Kim, J., Zhou, Q., Nam, S., & Oh, I. K. (2019). MXene artificial muscles based on ionically cross-linked Ti3C2Tx electrode for kinetic soft robotics. Science Robotics, 4(33), eaaw7797.