生体模倣(Biomimetics)のシステムにおいて、形状の設計は重要な技術要素とされています。今回Composits Science and Technologyに掲載された論文はMagnet-active soft materials (MSASMs)と呼ばれる磁界に対して応答・変形する柔らかな材料の動きをProgrammableに設計する手法を提案しています。
MASMsとしては過去に紹介した下の論文なども記憶に新しいです。
今回の手法はMASMsに対して、素早く実装でき、繰り返し動作にも優れる方法として下の図1のように磁性コンポーネントを配置するアプローチを取っています。
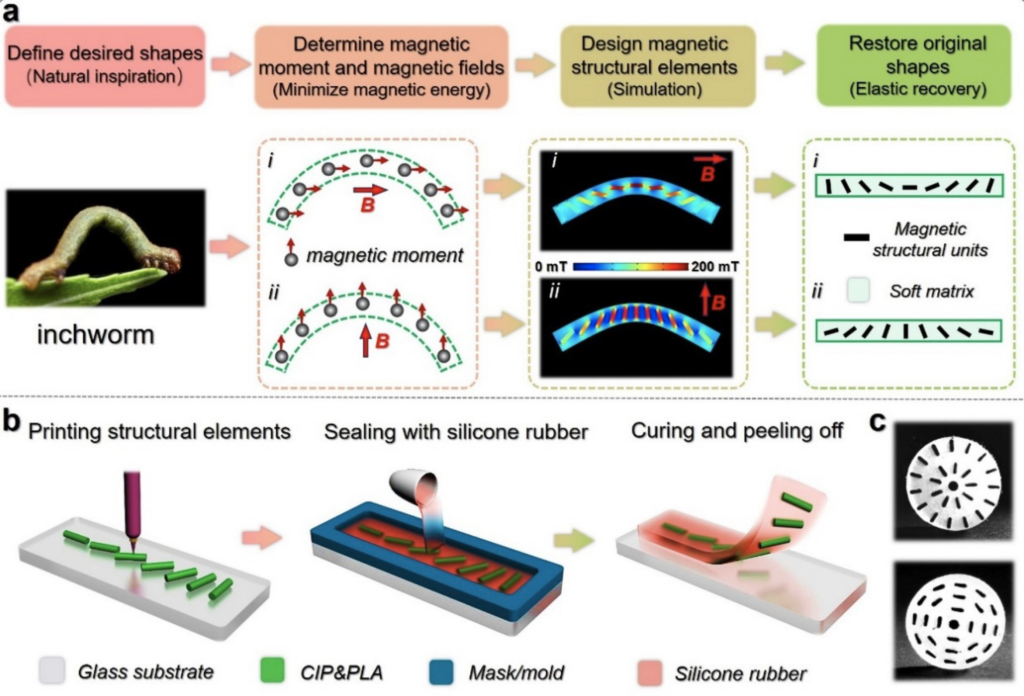
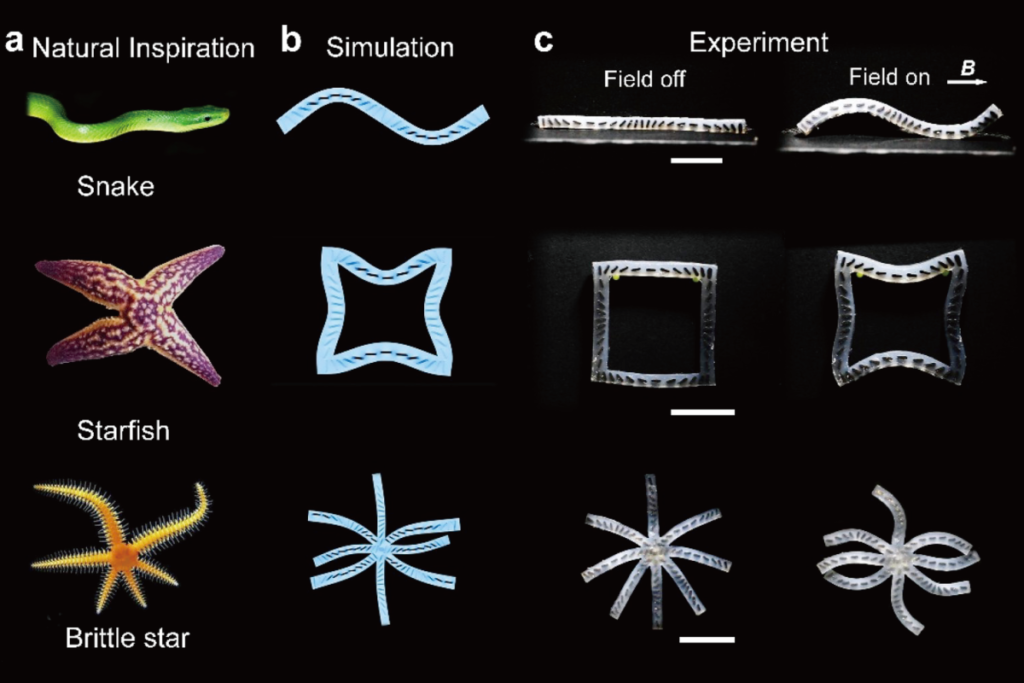
製造された物質には磁性体がある特定の向きで配置され、磁界に応じて配向しようとする力で変形します。ボディはシリコーンエラストマーで覆われており、磁界を取り除くと材料の復元力により元の形状に戻ります。
変形の関係はCOMSOLによりシミュレーションされており設計の段階で磁界に対する変形の様子を把握することができます。
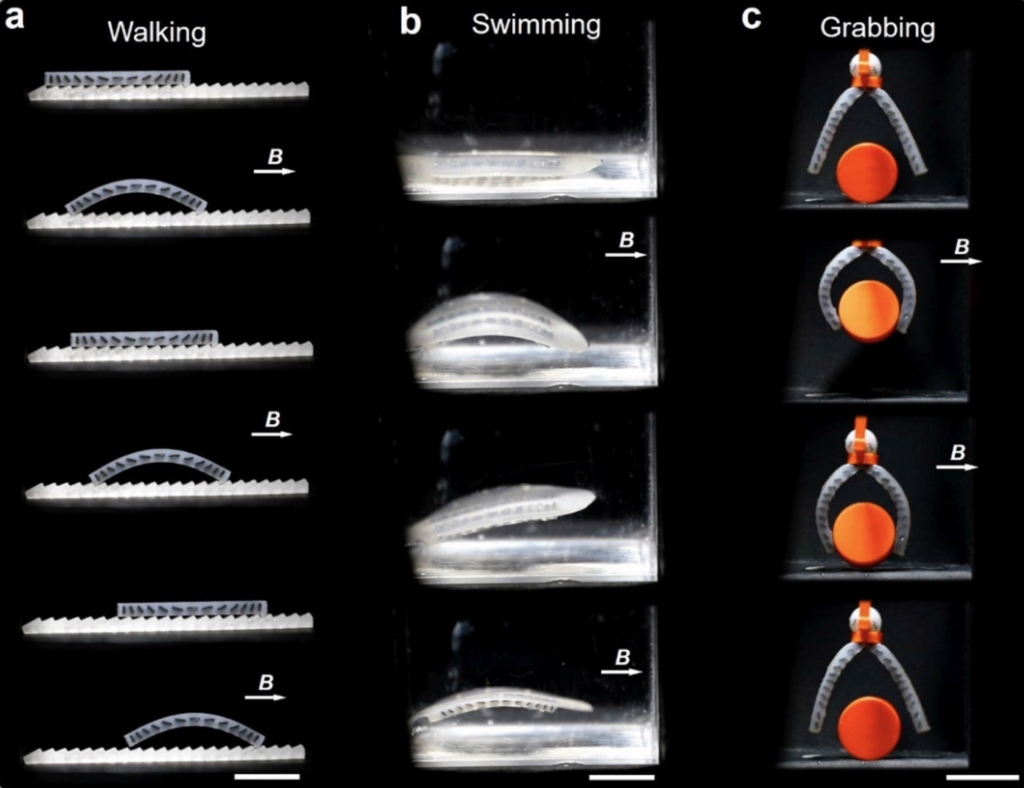
論文中では蛇やヒトデの動きの模倣や、歩行・泳ぎ・掴むといった動作を本手法により実現できることを示しています。歩行タイプのロボットでは数千回の動作でも目立った劣化が見られていないようでした。
シミュレーション、ファブリケーション 、マテリアルが接続されたProgrammable Matterの研究は今後も増えていきそうですね。
参考URL;
参考文献:
[1]Qi, S., Guo, H., Fu, J., Xie, Y., Zhu, M., & Yu, M. (2020). 3D printed shape-programmable magneto-active soft matter for biomimetic applications. Composites Science and Technology, 188(December), 107973. https://doi.org/10.1016/j.compscitech.2019.107973 Follow @aurordesign